新聞中心
發那科機器人應用項目:FANUC iR PickTool
類別:新聞中心日期:2019-12-09 14:38:55
發那科 iR PickTool是對傳送帶上的工件使用相機或光電傳感器等設備進行檢測�����,機器人配合傳送帶的運動對工件進行動態拾取的定制化軟件��。該軟件提供了多臺機器人共享一條傳送帶上工件數據信息的應用�,支持一臺機器人同時對應多條傳送帶進行跟蹤的應用。在iR PickTool軟件應用中�,機器人可以通過隊列管理或視覺跟蹤實現對傳送帶上運動的工件追蹤功能����。
利用iR PickTool對跟蹤系統進行調試,步驟如下:
示教用電腦的設定
(如使用示教器調試,不需要該步驟)
iR PickTool中�����,通過電腦對iR PickTool進行設定時�,需要對電腦進行設置。
在電腦上設置IP地址,確保示教電腦上設置的IP地址與機器人控制器的IP地址在同一網段
變更Internet Explorer的設定����,將需要連接的機器人控制器的IP地址設置為受信任站點
變更Windows防火墻設定��,使機器人控制器的通信不被Windows防火墻限制
2.機器人間的通信設定
(如只有一臺機器人��,不需要該步驟)
在使用iR PickTool跟蹤時��,機器人控制器間會存在大量的信息交換。如果發生通信延遲,會影響系統的性能���。因此,機器人間的通信是由機器人控制器間建立的本地網絡構成,不會受到其他通信的通信量影響���。構建機器人間通信設置時,需要注意以下事項:
IP地址的設定中,需要對各機器人控制器定義不同的機器人名稱
IP地址的設定中,需要使機器人間的通信所使用的端口IP地址設為連號
使用以太網編碼器時�����,必須使連接脈沖編碼器的機器人控制器的IP地址在前頭
3.脈沖編碼器的連接和設定
安裝脈沖編碼器時���,注意脈沖編碼器的安裝位置不會與機器人產生干涉�����,也不會進入相機的視野�。相比較脈沖編碼器直接安裝于傳送帶的驅動軸���、從動軸����,在編碼器前端安裝旋轉盤,使旋轉盤與傳送帶直接接觸進行旋轉的方式���,能夠更加精確地測量傳送帶的
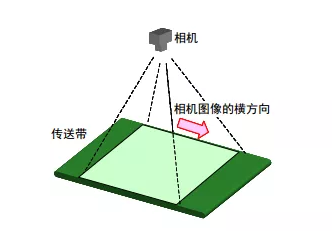
4.相機的連接和設定
(僅視覺跟蹤,隊列管理跟蹤時不需要該步驟)
在相機上安裝鏡頭���,設置于傳送帶上方,使相機光軸與傳送帶表面垂直���。設置相機時�,使傳送帶的傳送方向與相機圖像尺寸較大側相同。確保相機在傳送帶傳送方向上視野寬敞���。
5.觸針TCP的設定
在對跟蹤坐標系的設定、相機標定����、傳感器位置/托盤位置設定的過程中都需要使用觸針TCP進行設定�����。如果有多臺機器人,需要所有機器人都進行該作業�����。由于觸針一旦卸下后���,如果無法保證能夠正確地重新安裝到機器人上��,則設定的TCP無效�����,需要重新進行TCP設定。因此�����,在機器人程序的位置示教之前,建議機器人一直保持安裝觸針的狀態��。
6.機器人工作單元的設定
在完成硬件的連接和設置后�,需對iR PickTool中的參數(機器人、傳送帶��、固定工作站等)進行設置�。iR PickTool 的設定可在工作單元內的任意機器人控制器上進行���。但是不能同時在2臺控制器上進行iR PickTool的設定���。
7.視覺程序的示教
(僅視覺跟蹤���,隊列管理跟蹤時不需要該步驟)
在進行視覺跟蹤時����,需要對相機進行設定和標定工作。在完成標定工作后����,需要完成視覺程序的示教�。
8.機器人程序的示教
在視覺模板中基準位置設定后�����,可進行機器人的位置示教工作����,編寫具有跟蹤動作的機器人程序�。如安裝有iR PickTool Plug & Play模塊時,系統中將帶有標準TP程序。
9.追蹤動作的微調
基本動作示教結束后,需要對各個機器人分別進行微調�����。在跟蹤程序拾取位置之后�,輸入待機指令。機器人運動至拾取工件的位置正上方后�����,停止傳送帶�����,暫停程序。確認機器人的位置和工件位置的偏移量。如有偏移�,點動機器人移動至正確位置���,并將正確位置輸入機器人中���。
在使用相機檢出工件時�����,如果相機認識的跟蹤坐標系和各個機器人認識的跟蹤坐標系有偏移,則跟蹤動作會發生錯誤�����。該誤差會以“如果工件不旋轉����,則補償正確,如果工件旋轉�����,則發生偏移”的形式發生����。此時可以通過ADJ_OFS程序進行補償,對機器人的拾放精度進行補償。(文章來源于:網絡)
了解更多:發那科機器人
- 在線客服
- 服務熱線
- 微信咨詢
- 返回頂部