以下十點是
發那科機器人視覺功能詳解,讓大家更好的去了解
發那科機器人的強大及優勢之處。
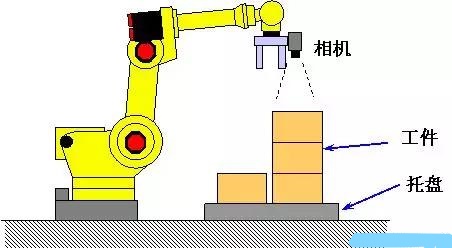
第一:iRVision 2.5D 視覺堆垛
視覺堆垛程序通過相機視野內目標比例的變化來估算目標的高度并引導機器人的運動補償目標的偏移,不但包括X軸,Y軸和X-Y平面旋轉度R,也同時包括Z軸。
使用iRVision 2.5D允許機器人只借助一個普通2D相機來
拾取碼放堆集的目標。
 第二: iRVision 視覺堆垛程序_1 (從寄存器R提取Z軸偏移)
第二: iRVision 視覺堆垛程序_1 (從寄存器R提取Z軸偏移)
此功能通過視覺計算尋找目標的2D位置和指定的寄存器數值,并引導機器人的運動補償目標的偏移,不但包括X軸,Y軸和X-Y平面旋轉度R,也同時包括Z軸。
寄存器R被用作存儲已知的目標Z軸高度,或者通過距離傳感器檢測出的Z軸高度信息。
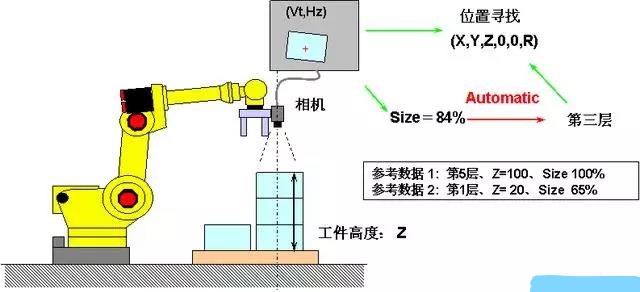
第三:iRVision 視覺堆垛程序_2 (從堆垛層數提取Z軸偏移)
此功能通過視覺結合視覺檢測結果和根據目標比例確定的目標層數(目標高度)計算目標的位置。目標層數依照參考比例和高度數據自動確定,因而,即使在視覺檢測中存在細微的比例誤差,也可以通過一個離散的層數(目標高度)來計算目標的具體位置。
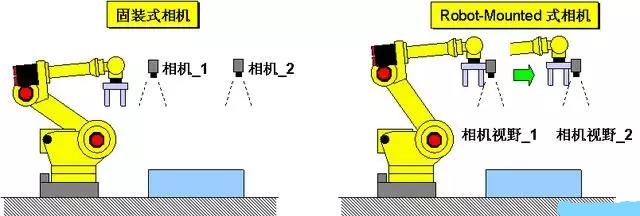
第四:iRVision 2DV 復數視野功能
2D復數視野程序提供通過若干固裝式照相機定位大型目標的能力,對通過Robot-Mounted式照相機進行檢測同樣有效。
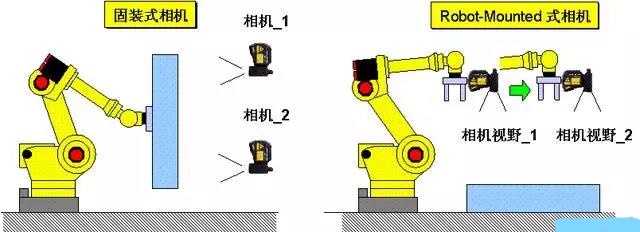
第五:iRVision 3DL 復數視野功能
3D復數視野程序提供通過若干固裝式3D照相機定位大型目標的能力,對通過Robot-Mounted式照相機進行檢測同樣有效。
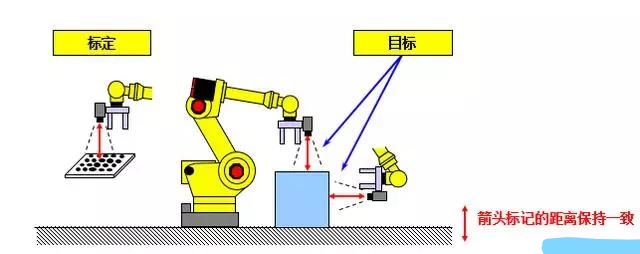
第六:iRVision 浮動坐標系功能(Floating Frame)
Robot-mounted式照相機的標定可以用于如下圖所示任意位置和方向下的iRVision程序。2D狀態下的移動補償與照相機實際位置相關聯。照相機的標定可以在任意位置下進行。減少示教工作量。
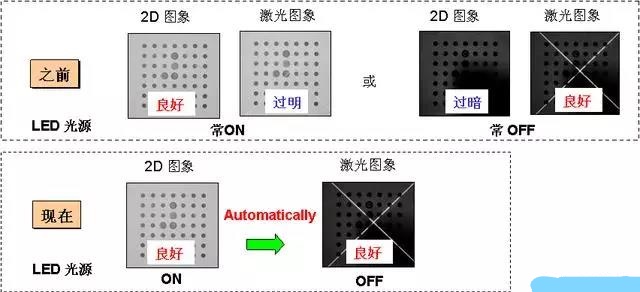
第七:iRVision 3DL LED 光源控制
此功能支持在3DL視覺程序中,在捕獲2D圖象和激光照射圖象時,同步控制LED光源的ON/OFF。通過此功能,可以獲得適當的外部光線環境,提升整個視覺系統的能力。
第八:iRVision 自動曝光功能
根據周圍環境光線強度的變化,iRVision將自動調節曝光時間,以取得和示教良好圖象類似的成像效果,全天候運行可能。

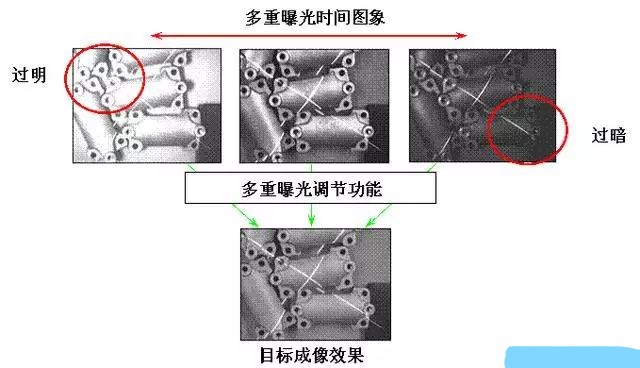
第九:iRVision 多重曝光功能
通過多個不同曝光時間的成像,選擇一個接近示教效果的成像,以取得一個具有寬泛的、動態的曝光范圍和成像效果。此功能在環境光線變化強烈時會有較好的效果。
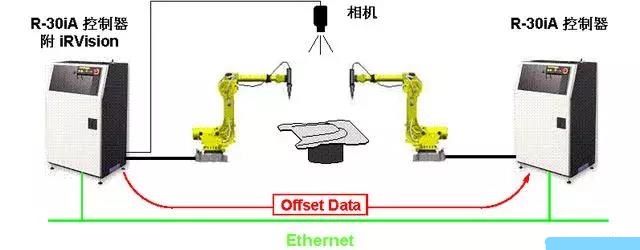
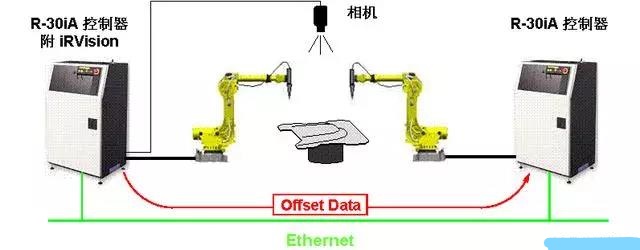
第十:iRVision 環形網絡功能(Robot Ring)
通過此功能,未附有 iRVision 視覺系統的機器人可以通過網絡調用附有 iRVision 視覺系統的機器人的偏移檢測數據。